Innovative Micro-Robotic Finger Enables Interaction at Micro Scales
Written on
Chapter 1: Introduction to Micro-Robotic Technology
Recent advancements in technology have empowered us to interact with entities across various scales, from the vastness of space to the microscopic world of bacteria and viruses. This research marks a significant stride in that direction. Scientists are increasingly demonstrating how nanotechnology can be leveraged for healthcare and other applications. The potential impact of these nanotech platforms, which enable human engagement at microscopic levels, is profound.
Researchers at Ritsumeikan University have made remarkable progress by enabling direct human interaction at micro scales, previously limited to microscopic observation. They have created a soft micro-robotic finger, facilitating human engagement with insects.
Micro-robotic fingers, often referred to as microgrippers, are tiny robotic devices designed to interact with minuscule objects. These devices can manipulate items that are either too small or fragile for human fingers. For instance, they might be employed to repair intricate components in electronics or to handle cells and tissues in medical settings.
Chapter 2: Breakthroughs in Insect Interaction
“Our strain-sensing microfinger has allowed us to directly assess the pushing motion and force exerted by a pill bug's legs and torso—an achievement previously deemed impossible! We expect that our findings will lead to further technological advancements in microfinger-insect interactions.”
~ Professor Satoshi Konishi, Lead Researcher
The motivation behind using this technology to interact with insects lies in the fact that microsensors have been primarily utilized to measure forces exerted by insects during activities like flying or walking, focusing on behaviors rather than the interaction with the microsensors themselves. This is where the soft micro-robotic fingers come into play.
The first video showcases Chinese researchers who have developed a bug-like microrobot that can run untethered at remarkable speeds, illustrating the potential of micro-robotics in various applications.

Chapter 3: Mechanics of the Micro-Finger
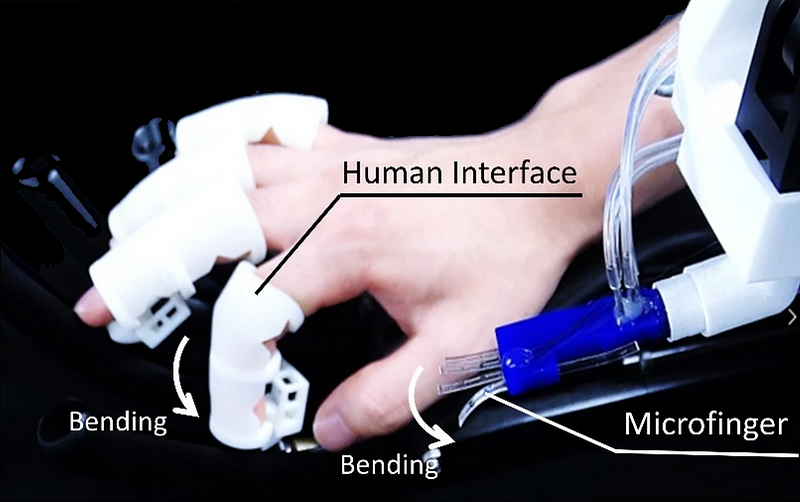
The microfinger created by the Ritsumeikan University team employs a liquid metal flexible strain sensor combined with a soft pneumatic balloon actuator, mimicking artificial muscle to facilitate movement. When integrated with a robotic glove, a user can control the microfingers, allowing safe interaction with insects and other tiny objects.
This system was tested to gauge the reaction force of a pill bug, serving as a model insect. The pill bug was secured using a suction tool while the microfinger applied force, measuring approximately 10 millinewtons, consistent with prior estimates.
The second video presents a dexterous soft robotic hand designed for delicate in-hand manipulation, highlighting the advances in soft robotics.
The implications of this research extend beyond enabling direct human interactions with the microworld; it also holds promise for applications in augmented reality (AR) technology. This groundbreaking invention paves the way for engaging with the world at much smaller scales. The complete research was published in the Journal of Science Reports.
Stay updated with more exciting developments by subscribing to my weekly newsletter!